Home < Documentation < Nightly < Modules < ComputeGLCMFeatureMaps
Introduction and Acknowledgements
|
Extensions: BoneTextureExtesion
Author: Jean-Baptise Vimort, Kitware Inc.
Contributors: Beatriz Paniagua (Kitware Inc), Lucia Cevidanes (University of Michigan - School of Dentistry), Erika Benavides (University of Michigan - School of Dentistry), Antônio Carlos de Oliveira Ruellas (University of Michigan - School of Dentistry)
Contact: Jean-Baptiste Vimort, <email>jb.vimort@kitware.com</email>
Acknowledgments: This work was supported by the National Institute of Health (NIH) National Institute for Dental and Craniofacial Research (NIDCR) grant R21DE025306 (Textural Biomarkers of Arthritis for the Subchondral Bone in the Temporomandibular Joint), NIDCR grant R01DE024450 (Quantification of 3D bony Changes in
Temporomandibular Joint Osteoarthritis) and National Institute of Biomedical Imaging and Bioengineering NIBIB) grant R01EB021391 (Shape Analysis Toolbox for Medical Image Computing Projects).
License: Apache License, Version 2.0
|
Module Description
This module can be used in order to compute run length texture feature maps of an input image. The computation of the run length features is based on the grey level co-occurrence matrix (GLCM) computed with itk::itkCooccurrenceTextureFeaturesImageFilter for each pixel’s neighborhood.
The GLCM matrix describes each neighborhood local texture, it is then used to compute the following co-occurrence texture features:
- Energy
- Entropy
- Correlation
- Inverse difference moment
- Inertia
- Cluster shade
- Cluster prominence
- Haralick correlation
Use Cases
|
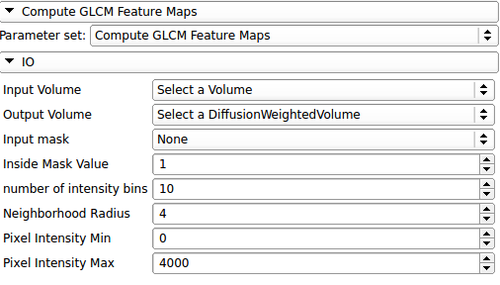
- Inputs:
- Input volume [index: 0] : Input Volume
- Output volume [index: 1] : Output diffusion-weighted volume where the 8 feature maps will be stored
- Input mask [-s --inputMask] (None) : A mask defining the region over which texture features will be calculated
- Inside Mask Value [-i --inputMask] (1) : The pixel value that defines the ”inside” of the mask
- Neighborhood radius [-n --neighborhoodRadius] (4) : The size of the neighborhood radius
- Number of Intensity bins [-b --binNumber] (10) : The number of intensity bins
- Pixel Intensity Min [-p --pixelIntensityMin] (0) : Minnimum of the pixel intensity range over which the features will be calculated
- Pixel Intensity Max [-P --pixelIntensityMax] (4000) : Maximum of the pixel intensity range over which the features will be calculated
|
Additional Information
Similar Modules
N/A
Information for Developers
The source code is available on github
