Documentation/Nightly/Modules/BVeR
|
For the latest Slicer documentation, visit the read-the-docs. |
Introduction and Acknowledgements
|
Extension: Brain Volume Refinement | |||||||
|
Module Description
This module offers an alternative to manual correction of brain volumes. The BVeR algorithm is suitable for a broad use of healthy brain structural MRI images, e.g. T1w and T2w, offering broad application in many large data analyses. The main contribution of the proposed method is related to the reduction of manual interference in the brain volume refinement after an automatic skull stripping procedure been performed, helping to reduce human errors and processing time. Even though the BVeR method does not provide a fully brain extraction algorithm, it can be helpful as a ad hoc image processing step in which increase the quality of well-known brain extraction algorithm in the literature. Any brain extracting frameworks can be refined with this method, e.g. FSL-BET, FreeSurfer, BEasT, 3DSkullStrip, ROBEX, OptiBET and many others.
Use Cases
- Use Case 1: Cortical thickness surface delineation.
- When dealing with grey-matter overestimate due to badly brain extraction step.
- Use Case 2: Brain atrophy
- Assist in the total brain volume estimate also reducing the non-brain tissues belonging outside the grey-matter tissue frontier.
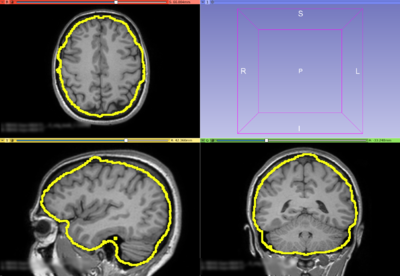
T1 weighted MRI Image with FreeSurfer original brain mask overlay (only the out surface is represented)
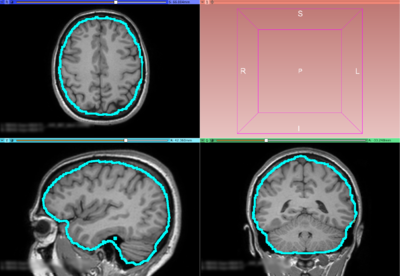
Same T1 weighted MRI Image but with BVeR correction mask overlay (using the previous FreeSurfer input)
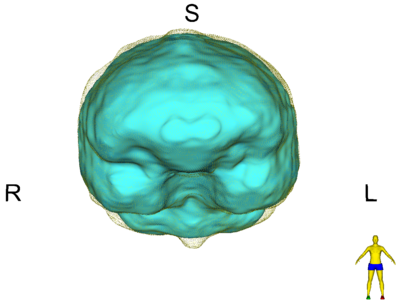
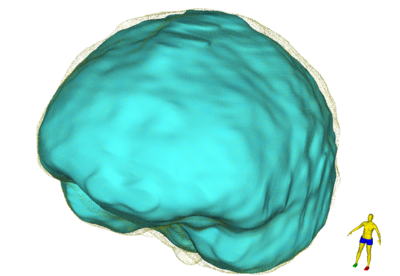
A simple 3D representation comparing FreeSurfer original brain mask (yellow dots frame) and BVeR output (light blue volume)

Same 3D representation but using a Lateral view
Same but illustrating the superior part of the brain volume.





Tutorials

Apply BVeR on T1w MRI image
Panels and their use

IO:
- Input Volume
- Input volume. This is a previously brain extracted image which presents small segmentation outliers on the brain frontier (e.g. dura matter or bone marrow). For instance, the output from FSL-BET or any other brain extraction method can be added here.
- Updated Volume
- Updated Volume with the outlier segmentation being corrected.
- Updated Brain Mask
- Updated Brain Mask corresponding with the Updated Volume
BVeR Parameters:
- Neighborhood Radius
- A list of 3 values indicating the (x,y,z) size of the neighbourhood. This should large enough in order to get a consistent local statistics (e.g. values around 3 to 8). Example: a radius of (1,1,1) creates a neighbourhood of (3,3,3) in image space.
- Convergence
- A relative value that indicates how permissive is the algorithm to keep changing the brain borders. This counts how many voxels were changed in previous iterations and then estimate if the total amount of changes reaches a limit (regarding the total number of voxels changed in the brain volume). High values will result in conservative outputs (fewer changes in the brain volume), on the other hand, low values will force a strong volume difference.
Advanced Parameters
- Number Of Iterations
- Maximum number of iterations. The brain mask is iteratively updated in order to vanish a bigger error in the previous brain extraction result. This is an up limit threshold in order to avoid infinite loop in the brain volume correction. If the convergence level does not reach a stable result, then the number of iteration limit will stop the algorithm.
- Apply Binary Hole Filling
- Choose if you want to fill holes in the first brain mask. This is important to not place a searching window inside the brain area. One can avoid this if a previous visual check was made in the image and confirm that there are no zero values voxels inside the brain area.
- Fill Holes Radius
- A list of 3 values indicating the (x,y,z) size of the neighbourhood used in the binary filling hole procedure. This parameter is only used if "Apply Binary Hole Filling" option is checked. Example: a radius of 1 creates an isotropic neighbourhood of (3,3,3).
- Selection Mode
- The BVeR algorithm relies on the estimate of non-brain voxels that are still present in the input image. These outliers voxels are detected by a determined grey-level threshold, which is iteratively updated. This option will define what is the type of grey level threshold used in the entire process. Local=The threshold is calculated for each neighbourhood - Global=The threshold is set by the global image to mean value (zeros are not considered) - Manual=The user defines a fixed threshold.
- Manual Threshold
- This parameter is only used if "Selection Mode = Manual" is checked.
Similar Modules
None
References
- Insight-Journal...
Information for Developers
| Section under construction. |